

自在2010北京车展首度亮相后,一汽-大众CC轿车备受关注,预计将于2010年7月份上市。该车不同车型分别采用大众1.8TSI和2.0TSI(涡轮增压缸内直喷)2款发动机,1.8TSI发动机的最大功率可达118 kW,最大扭矩可达250 N?m,2.0TSI发动机最大功率可达147 kW,最大扭矩可达280 N?m。这2款发动机分别匹配6速和7速DSG双离合器变速器。TSI与DSG技术的完美结合,使得该车0~100 km/h的加速时间仅需7.9 s,并且在拥有出色动力性的同时,还具有目前国际领先的燃油效率,显著降低了油耗及尾气排放。此外,在安全及舒适配置方面,除高强度车身、安全气囊等基本配置外,CC还采用了包括主动巡航系统ACC、道路辅助系统(车道偏离预警)Lane assist、倒车影像Rearview camera、可视停车辅助系统OPS、自动泊车辅助系统Park assist、自适应底盘控制系统DCC以及主动空调座椅(主动通风系统)等先进装备。为了方便广大读者对该车的了解,本文将对CC的车身电气系统的一些技术亮点进行简要介绍。
1.主动巡航系统ACC
ACC系统采用雷达传感器监测与前车的距离和相对车速,并控制车辆,使其与同方向行驶的前车保持驾驶员设定的距离。
(1)系统组成
ACC系统由车距控制系统控制单元J428(集成自动车距控制传感器G550)、动力总线断路继电器J788、仪表控制单元J285以及控制杆组成(图1)。

图1
ACC传感器发射频率为76.5 GHz,探测距离为150 m,车速探测范围为30~210 km/h。ACC系统激活的前提条件为:变速杆置于D、S或Tiptronic位置,车速介于30 ~210 km/h,ESP系统开启。
(2)系统校准
当发生以下情况后,需要对ACC传感器进行机械调整。
①后桥底盘位置发生变动。
②更换传感器、传感器固定架、前保险杠和汽车发动机舱盖。
③车辆前部损坏(如车辆发生碰撞)。

图2
如(图2)所示,传感器支架S1用来调整ACC传感器感应区域的水平角度(数据块6-3区数据),传感器支架S2用来调整ACC传感器感应区域的垂直角度(数据块6-2区数据)。
在对ACC系统进行校准时,需要使用专用工具VAS6430/1(校准装置)和VAS6430/2(激光发射器和目标盘)。
2.道路辅助系统(车道偏离预警)Lane assist
道路辅助系统采用视频摄像机监控道路情况,如果车辆偏离车道,系统将进行转向修正或者采用转向盘震动及声光警报的方式发出警告。
(1)系统组成

图3

图4
道路辅助系统由道路辅助系统控制单元、电动助力转向控制单元、助力电机、多功能转向盘、转向柱控制单元及仪表组成(图3)。道路辅助系统控制单元(包括摄像头)安装在车内后视镜背面的风挡玻璃上(图4),它根据摄像头所检测到的灰阶对比值来确定车道标记(图5),并根据车道标记计算出实际行驶车道,确定车辆在车道中的位置。道路辅助系统可以计算出在驾驶员当前操作下车辆的预期路线,当预期路线将要偏离车道时,系统将进行转向修正,以保证车辆在预设车道内行驶。道路辅助系统正常工作需满足以下条件。

图5
①车速高于65 km/h。
②车道宽度2.45~4.60 m。
③摄像头视野清晰并且摄像头必须能够识别出车道边界(两边的车道标记)。
④车道标记之间的距离不超过标记本身长度的2倍。
有很多路况会造成以上条件无法满足,例如路面出现强光炫目、覆盖积雪、柏油路面的结合处、高速公路出口标记、道路施工时标记的引导线以及边界或路边草皮都会引起摄像头不能正确识别车道标记。出现这种情况,仪表将显示有关道路辅助系统的文字警告信息,并伴有声音警告提示。
(2)系统校准
与ACC系统相同,道路辅助系统在某些特定情况下也需要进行校准,主要包括以下几种情况。
①道路辅助系统控制单元内存储“未进行基本设定或基本设定不正确”的故障记忆。
②更换了道路辅助系统控制单元J759。
③拆卸或更换前风挡玻璃。
④对后轴进行过调整。
⑤对悬架进行过调整使得车身高度发生变化。
⑥更换了车身水平传感器。
道路辅助系统校准需用到专用工具VAS6430/1(校准装置)和VAS6430/4(校准板),进行校准时需要注意以下几点。
⑦道路辅助系统控制单元J759不能被遮盖。
⑧安装道路辅助系统控制单元区域的风挡玻璃必须清洁。
⑨安装道路辅助系统控制单元区域的风挡玻璃不能有破损。
⑩关闭车辆的所有外部灯光。
11保证车辆前轮中心和专用工具VAS6430/1之间有足够的距离。
3.可视泊车辅助OPS
OPS 是普通倒车辅助系统(倒车雷达)的扩展功能,它不仅采用不同频率的声音信号来提示车辆与障碍物的距离变化,而且车辆相对障碍物的距离采用不同颜色的色块在导航屏幕上显示。
4.自动泊车辅助系统Park assist
自动泊车辅助系统(即泊车转向辅助系统)是可视泊车辅助系统的扩展,装备自动泊车辅助系统的车型在泊车过程中可自动转动转向盘,驾驶员只需要控制油门、离合器和制动踏板便可完成泊车过程。驾驶员在任何时刻都可介入转向过程,如果在泊车过程中驾驶员抓住了转向盘,那么自动泊车辅助系统就会关闭,由驾驶员继续手动控制完成泊车过程。
自动泊车辅助系统的组成元件包括:泊车辅助/泊车转向辅助按钮、左前泊车辅助转向传感器、右前泊车辅助转向传感器、前部泊车辅助传感器(4个)、后部泊车辅助传感器(4个)、轮速传感器、电动助力转向装置、ESP控制单元、泊车辅助转向控制单元J791、泊车辅助蜂鸣器(前/后)以及转向开关,各组成元件的安装位置如(图6)所示。

图6
(1) 泊车辅助/泊车转向辅助按钮
泊车辅助按钮E266用于开启前部停车距离控制(泊车辅助),如果停车距离控制因相关元件的技术故障而失效,则会通过警报灯闪烁进行报警提示。泊车转向辅助按钮E581用于激活泊车辅助的泊车转向功能。如果泊车辅助由于相关元件的技术故障而无法激活,则警报灯闪烁报警。
(2) 泊车辅助转向传感器
左前、右前泊车辅助转向传感器的信号是泊车辅助转向功能专用的,它们被用于测量可能停车位,并且在泊车过程中监测前部末端的侧向空位,同时信号也被用于计算车辆驶过角度。这两个传感器具有自诊断能力,如果该传感器有故障,泊车辅助转向功能(PA)将不能使用,但是泊车辅助功能(PDC)仍然有效。
(3)泊车辅助传感器
泊车辅助传感器用于测量车辆与附近障碍物的距离,可用于泊车距离控制和泊车辅助转向。全部8个传感器都具有自诊断功能,若其中一个传感器失效将导致泊车辅助和泊车辅助转向功能均失效。
(4) 泊车辅助转向控制单元J791
J791位于转向柱的左侧,中央电器控制单元的上方,集成了泊车辅助转向功能和可视泊车辅助功能。也就是说,如果车辆装备了自动泊车辅助系统则不必装备泊车辅助控制单元J446(用于可视泊车辅助)。如果车辆只装备J446,则无法实现泊车辅助转向功能。
5.自适应底盘控制系统DCC
CC底盘系统在保持原有平台侧重于运动感悬架匹配的同时,采用了铝制转向节和与车身柔性连接的后副车架,降低了车辆在行驶过程中的滚动噪音,提高了乘坐舒适性。同时它还采用了自适应底盘控制系统,该系统主要由传感器电控减振系统控制单元和可调式减振器组成。
(1)传感器
自适应底盘控制系统DCC中包含6个传感器,其中3个为车身高度传感器,分别是G76(左后)、G78(右前)和G289(右前);另外3个为车身加速度传感器,分别是G341(左前)、G342(右前)和G343(后部)。每个传感器均各自独立连接至电控减振系统控制单元J250。
(2)电控减振系统控制单元J250
可调式减振器通过电控减振系统控制单元J250来调节,此控制单元根据大众集团所研发的控制运算法则来调节阻尼。依据不同的输入信号,整个可调式减振器的脉谱可被使用。此控制运算法则也能够通过按钮在“普通”、“运动”和“舒适”3个驾驶模式间自由切换,从而达到用户的需求。
J250可根据路面状况、不同的行驶工况(制动、加速或转弯)和驾驶员要求对车辆减振器进行自适应调节。因此,驾驶员始终能获得理想的减振设置。
(3)可调式减振器
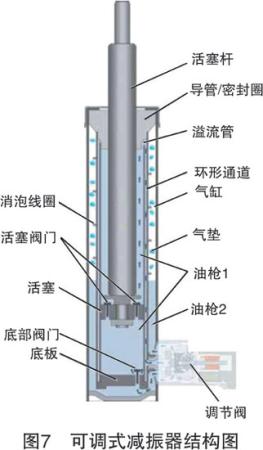
图7
可调式减振器应用于DCC自适应底盘控制系统,采用双管结构,分为伸张和压缩两个工作行程,其结构如(图7)所示,活塞在油腔1内工作,气缸包含油腔2,油腔2内有一个附加气垫。油腔内仅部分注油,注油口上有一个带消泡线圈的气垫,油腔2用于补偿机油量的变化。
机油流动由位于活塞、油腔基座和调节阀上的减振器阀单元控制。该阻尼阀单元由扁弹簧、螺旋弹簧以及带油道的阀体构成。电子控制的调节阀安装在减振器外侧以调节阻尼力,通过改变电流,减振器设置的阻尼力可以通过调节阀在数毫秒的时间内完成调节。
车辆的高度传感器及车身的加速传感器采集信息用于计算所需的减振器设置。各个减振器设置脉谱储存在电控减振系统的控制单元J250中。
(邱梦璇)